
3/3



三上悠亜 2021年カレンダー『2021 YUA MIKAMI Calendar your days』2020年9月25日(金)に発売!!
D2C事業6ブランド展開のオーガニックグループ株式会社 D2C特化型マーケティング支援会社 株式会社ADDICTと資本業務提携

ついに待望の真空管フォノイコライザー・キット発売!(信頼のラックスマン製) しかも!イコライザーカーブを連続可変的できる微調整付き!!

店頭什器の販促効果を検証する「什器リサーチ」を開始
新型コロナウイルス感染患者へ5-アミノレブリン酸(5-ALA)を投与 長崎大学 特定臨床研究開始

Qoo10、ABEMA新番組「Qosmetic 8」公式メイクアップ特集コーナーをオープン

「スチームクリーム」が、いま最前線で闘う医療・介護従事者の皆さまへ、保湿クリームをお届けいたします! 『医療・介護従事者支援プロジェクト』#uhappyback第3弾募集開始

【goo Simseller】端末と通信回線をセットでお試し!「30日間トライアルキャンペーン」を開始
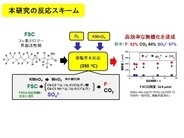
神奈川大学 理学部 堀 久男 教授の研究グループが、有機フッ素化合物「フッ素テロマー界面活性剤」の高効率な分解・無機化に成功しました。

鍼灸マッサージを全国展開するフレアス東京大学医学部附属病院と痛みのコントロールなど効果検証に向けたデータベース構築に関する研究開始
日本電信電話株式会社(本社:東京都千代田区、代表取締役社長:島田明、以下「NTT」)、三菱電機株式会社(本社:東京都千代田区、執行役社長:漆間啓、以下「三菱電機」)は、NTTのネットワークおよびコンピ...








