
この記事をまとめると
■1980年代に国産車がこぞって4WSを採用するもすぐに下火になった■その理由は当時の技術力では完成度がイマイチだったため
■だがいま世界的に4WSが脚光を浴びているので理由を解説する
1980年代に国産車がこぞって4WSを採用するも完成度は……
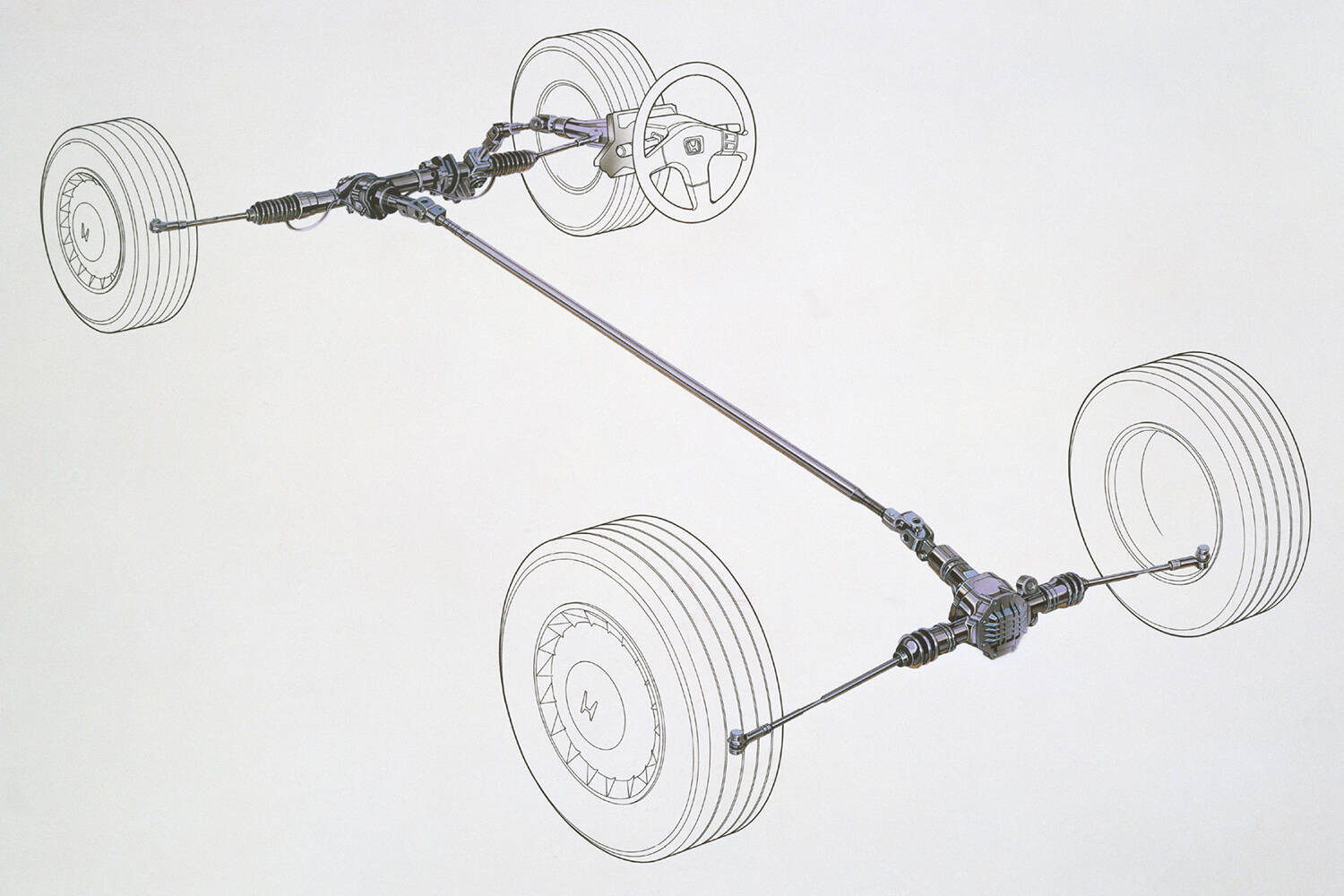
1987年は4WS(4輪操舵システム)の誕生で沸いた記念すべき年となった。奇しくもホンダ・プレリュードは前輪駆動のFFに、日産スカイラインはFRの後輪に、そして三菱・ギャランはフルタイム4WDの後輪に採用するなどして、それぞれが特徴的だった。各社、ステアリングの操舵操作や車速に応じて後輪を操舵していたが、完成度という面では今ひとつ。
当時の4WSは前輪の操舵だけでなく、後輪にもスリップ角を機械的に与えてコーナリングでの旋回性能を高めるのが狙いだった。理屈として、通常の前輪2輪操舵車では、まずコーナリングに向けてドライバーがステアリングを切り込む操作を行うと前輪にスリップアングルが発生しタイヤがコーナリングフォース(旋回グリップ力)を生み出す。そのグリップ力によって車体にヨーレートが発生、車体全体にスリップアングルがついて、車体に取り付けられている後輪も前輪と同相のスリップアングルが付いてコーナリングフォースが発生する。結果4輪が旋回グリップ力を得てコーナリング姿勢に入っていくのである。

このように前輪が旋回グリップ力を発生してから後輪のグリップ力が引き出されるまでに若干タイムラグが生じる。ロングホイールベース車ではそのタイムラグが大きくなり運動性能面で不利となる要因にもなっていたのである。4WSを装備することで前輪の操舵タイミングと間髪入れずに後輪にも同相のスリップアングルを与えられるので、ロングホイールベース車でもショートホイールベース車のような軽快な運動性能を引き出せると謳われたのだった。

だが、現実的には各社とも難しい壁に直面した。後輪を操舵することで車両の安定性は著しく損なわれ、最大でも0.5度程度の微小な操舵量しか与えられなかったのである。そもそも自動車は直進安定性を保つのがもっとも難しい。轍やバンプ、横風などさまざまな外力の影響を受けながら真っ直ぐ走らせるのはじつは非常に高度な技術力が必要なのだ。

その肝となるのはホイールの位置決めを正確に行うことで、前輪はもちろん後輪もしっかりとトー方向の動きを抑制し制御する必要があった。そのためにはアライメントの正確な設定だけでなく、サスペンションジオメトリーの最適化、そしてブッシュを介して装着されるタイヤ/ホイールが無駄な動きをしないことが求められる。
当時の国産車は最高速度が低く、また路面の舗装状態も現代ほど良好ではなかったことからブッシュの撓みを大きくとって振動の車体への伝播を防ぎ、乗り心地と耐久性を高めることに注力していた時代だ。欧州車はもともと高速直進性が重要視された車作りをしていた上に、ポルシェが928に採用したバイザッハアクスルのようにブッシュのコンプライアンス量や撓む方向を最適化し運動性と安定性の両立を図っていただけに、4WS装置に余分なコストをかけなくても優れた操縦性を手に入れていたと言える。

ランボルギーニやAMGにベントレーも搭載する
だが近年、その欧州車を中心に4WSが再び見直され、大きなムーブメントとなって自動車メーカーの正規採用が拡大している。まず口火を切ったのはメルセデス・AMG GT S/Cだ。2015年に登場した同モデルはフロントミドシップエンジン搭載/リアトランスアクスルの後輪2輪駆動だったが、その後輪には操舵装置が装着されていた。

AMGが採用したのはサプライヤーから供給される後輪操舵装置で、左右のリヤサスペンションアームにそれぞれ一個ずつアクチュエーターモーターを装着しタイロッドを稼働させることで左右後輪を個別に制御していた。個別制御を行うことで後輪内輪と外輪で異なる操舵角を設定でき、内輪差やアッカーマンアングルを取り入れて実用性を高めることができた。その結果、それまで不可能とされていた逆相での制御も可能となり旋回半径を小さくでき、低速での小回り特性を大幅に改善することも可能となった。逆相操舵でタイトターンも行いやすくなり全車速域で運動性能を大幅に高めることができたのだ。

この技術のブレークスルーはしっかりしたシャシー設計に加え、操舵角速度、ヨーレートやG、車輪速などのセンサーと演算能力が大幅に高められたことが上げられる。

ルノーは2017年に4コントロールをFFのメガーヌに初採用し、FFスポーツの走りを一変させた。FF車はタイトコーナーのパワーオンでプッシュアンダーを引き起こすのが当たり前の特性であったが、ルノーは後輪を逆相に操舵することでアンダーステアを軽減しFFの旋回性能を大幅に高めることに成功したのだ。また暖まりにくい冬場のFFの後輪を同相に操舵することで安定性も高めることができる。

ルノーの後輪操舵システムは後輪左右のセンターに一つのアクチュエーターモーターを装着して左右後輪を同時に操舵するのだが、タイロッドアームに独特な形状を与えることでアッカーマン特性、内輪差特性をクリアしている。1モーターはコストや重量の軽減効果も高く4WS普及の大きな技術的ブレークスルーとなると言えるだろう。

今後の高性能車は4WSなしでは語れない。そんな時代に入っているのだ。
























![[のどぬ~るぬれマスク] 【Amazon.co.jp限定】 【まとめ買い】 昼夜兼用立体 ハーブ&ユーカリの香り 3セット×4個(おまけ付き)](https://m.media-amazon.com/images/I/51Q-T7qhTGL._SL500_.jpg)
![[のどぬ~るぬれマスク] 【Amazon.co.jp限定】 【まとめ買い】 就寝立体タイプ 無香料 3セット×4個(おまけ付き)](https://m.media-amazon.com/images/I/51pV-1+GeGL._SL500_.jpg)







![NHKラジオ ラジオビジネス英語 2024年 9月号 [雑誌] (NHKテキスト)](https://m.media-amazon.com/images/I/51Ku32P5LhL._SL500_.jpg)
